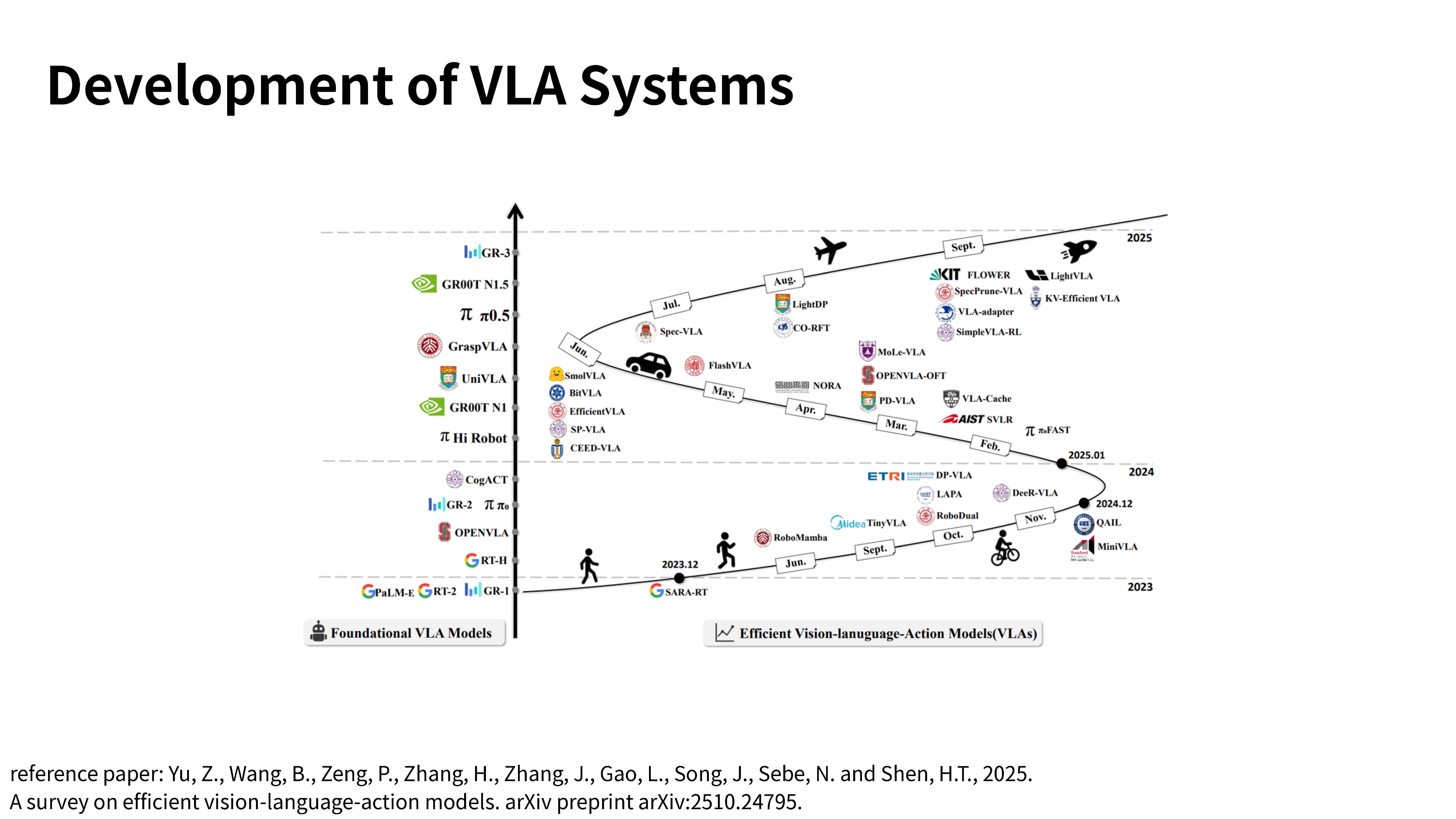
Introduction of VLA
Lead: Martin Chen
Join us this term as the Robotics Society launches a new Vision–Language–Action (VLA) project, led by the society’s VLA project lead.
🤖 What is VLA?
VLA is a modern robotics approach where robots learn to
- 👀 see the world through vision
- 🗣 understand human instructions through language
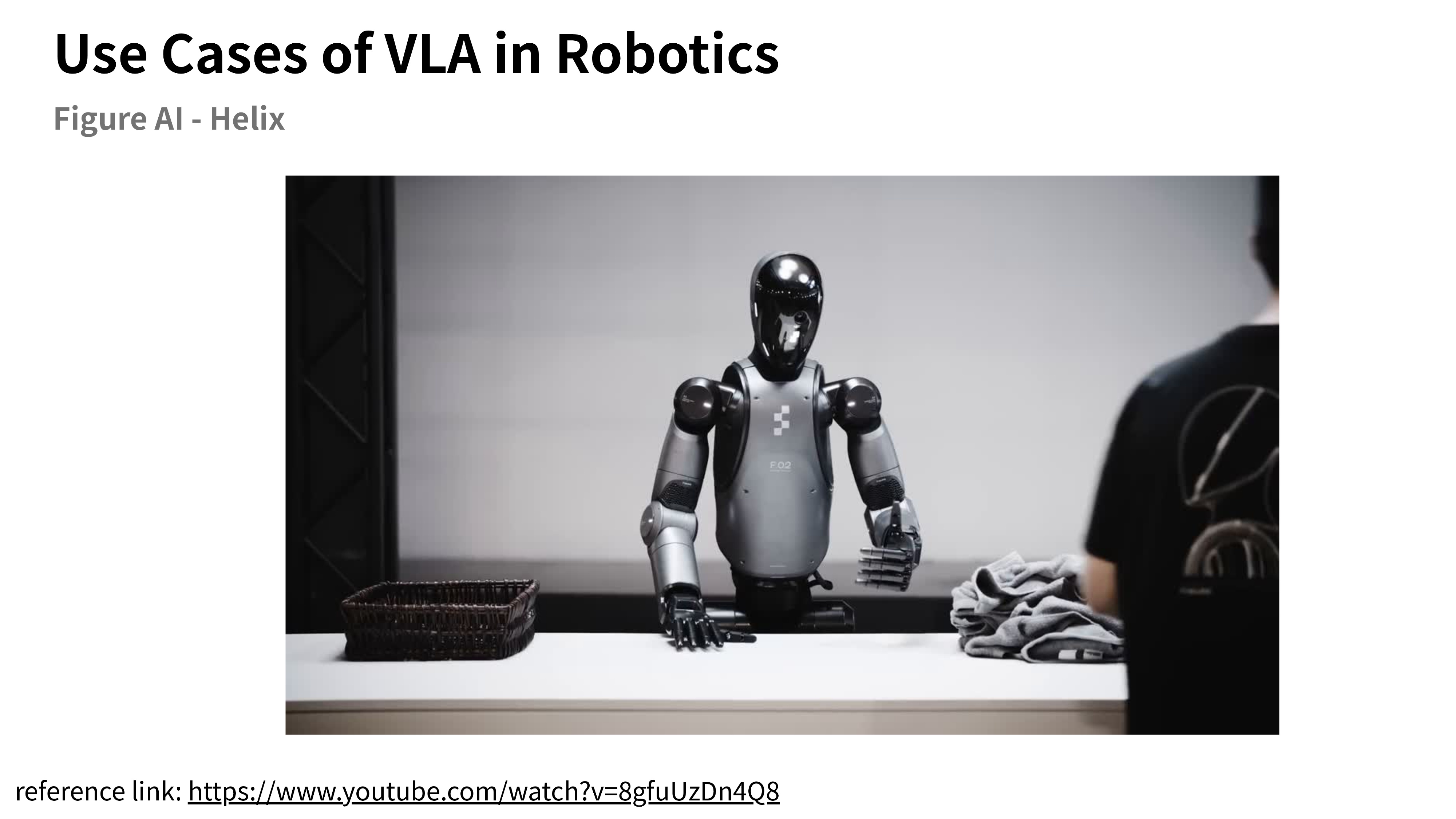
- 🦾 generate actions in the real world
using learning-based methods instead of hand-crafted rules.


🚀 Why VLA?
This is the direction modern robotics is moving towards. With recent advances in vision and language models and larger robot datasets, learning-based manipulation has become much more practical and is now widely used in research and industry.
🛠 What we’ll do this term
- Work with real robot datasets
- Train simple imitation policies in simulation
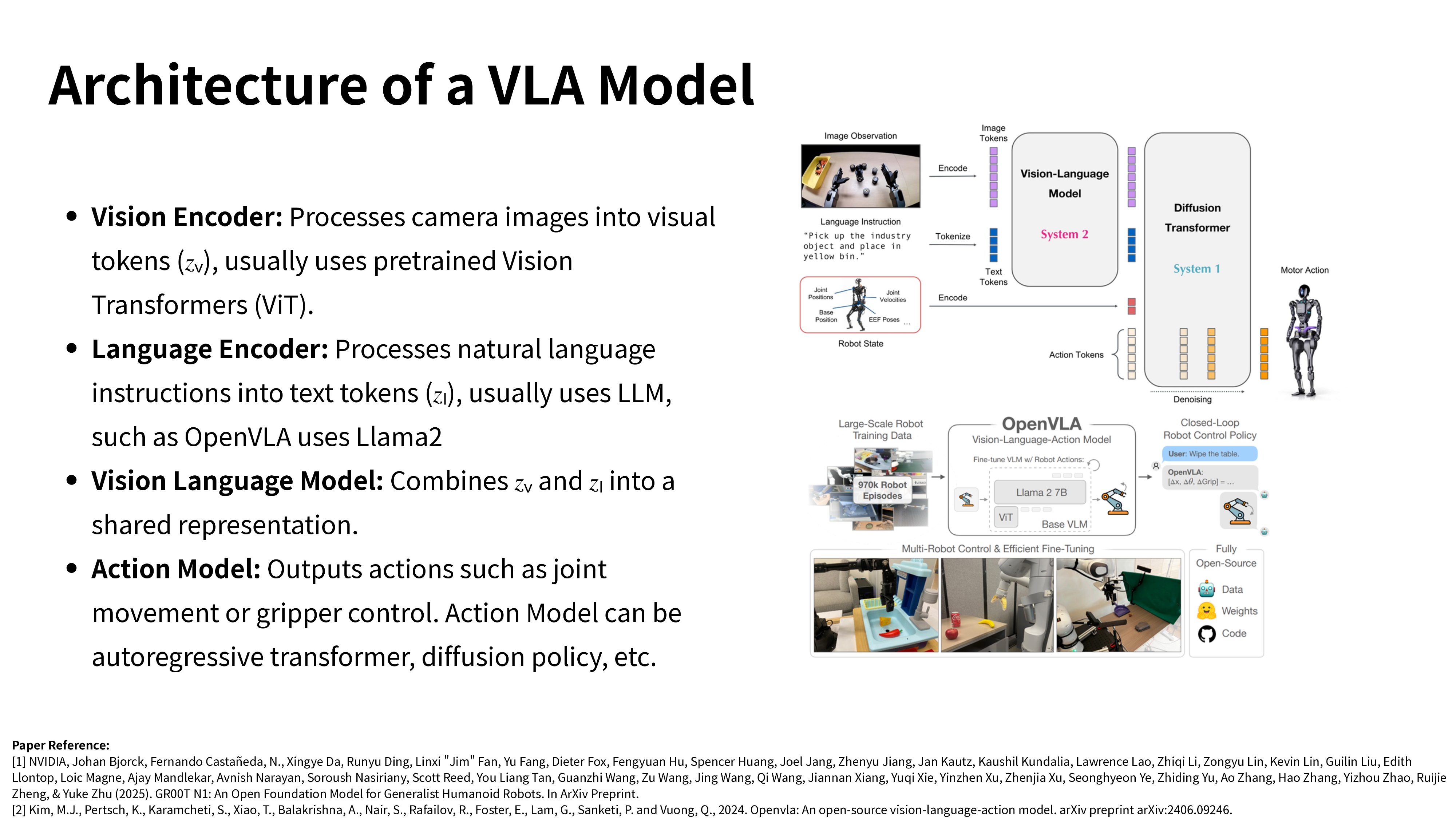
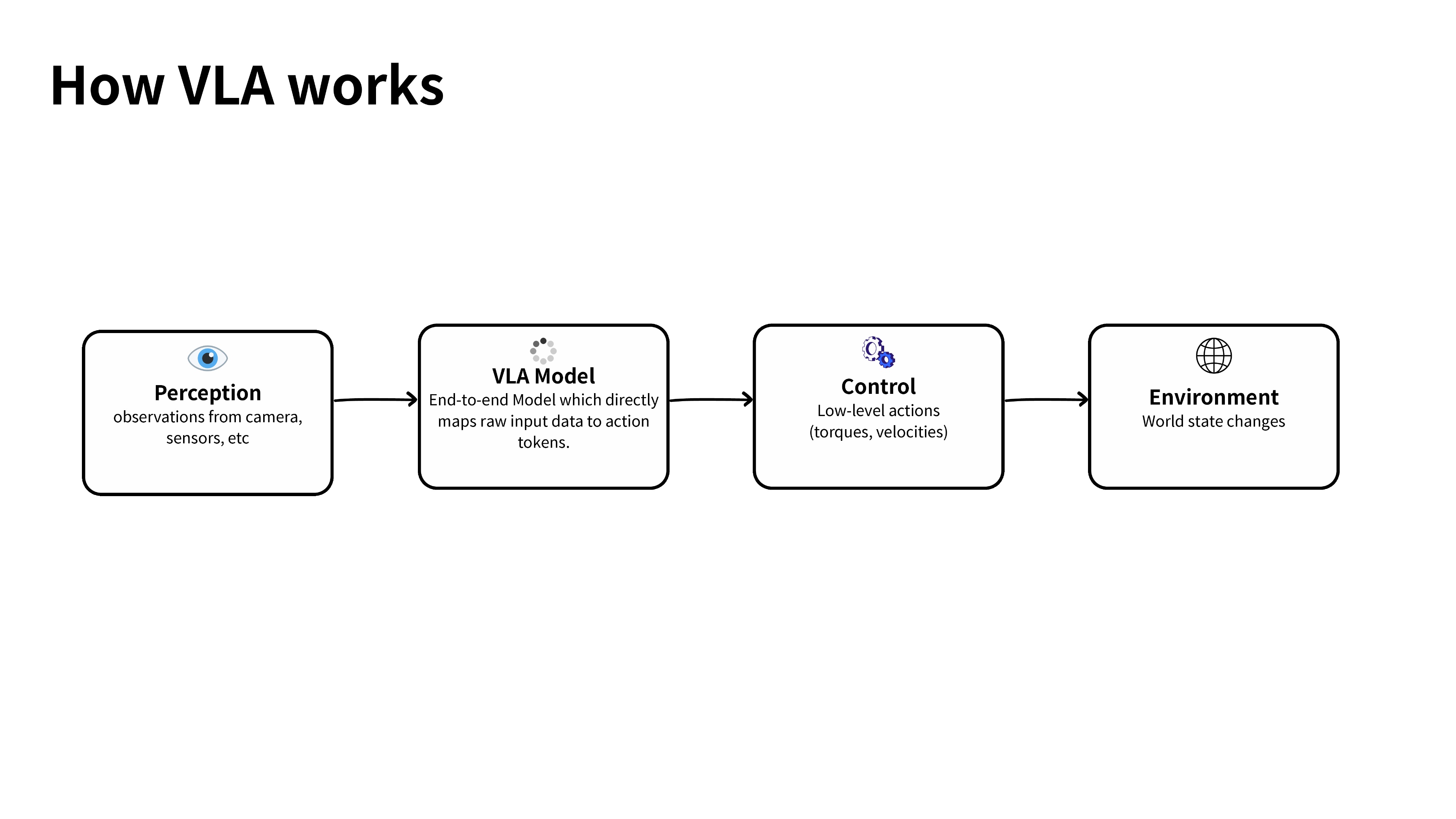
- Break down what a VLA system actually looks like
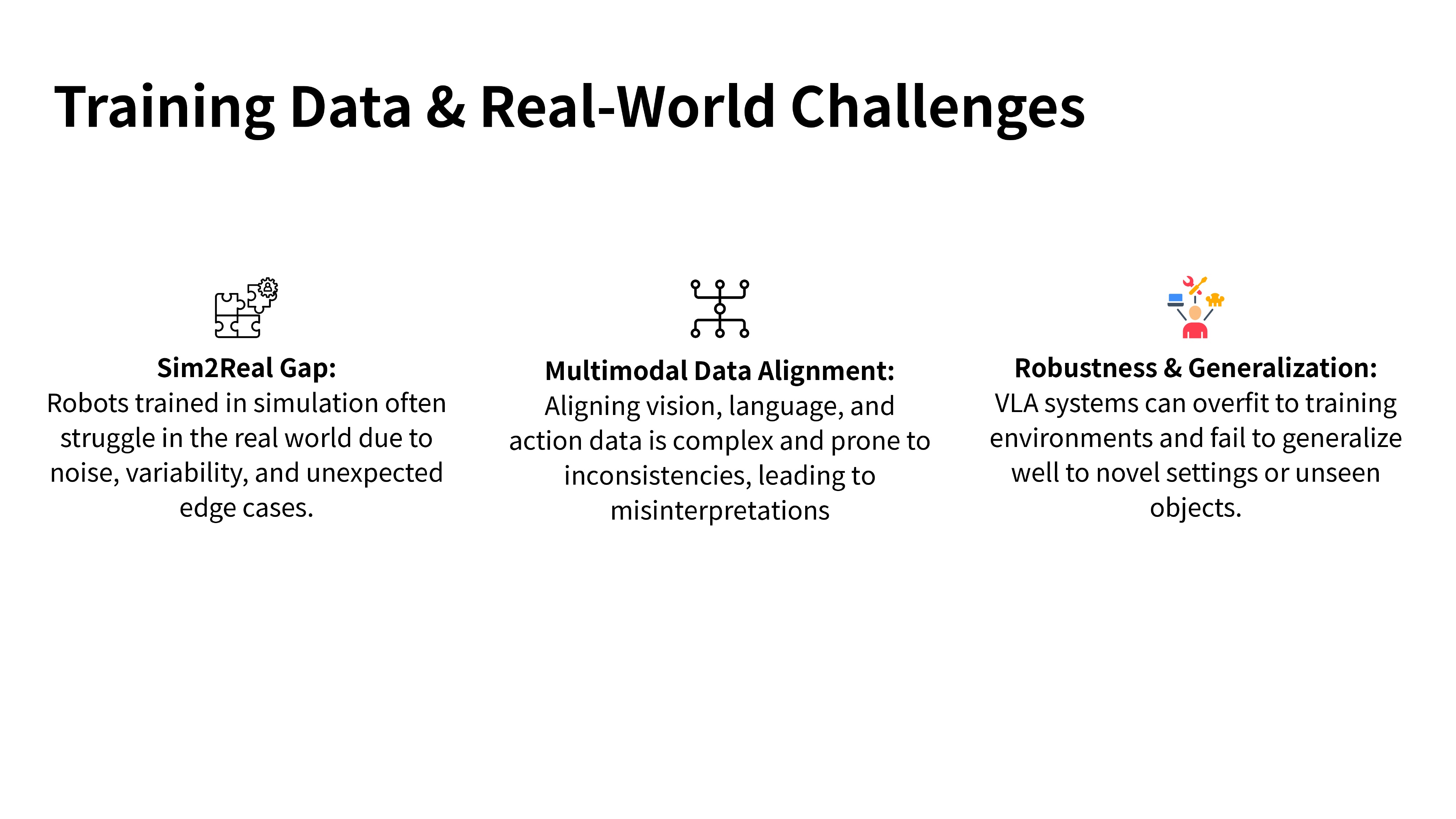
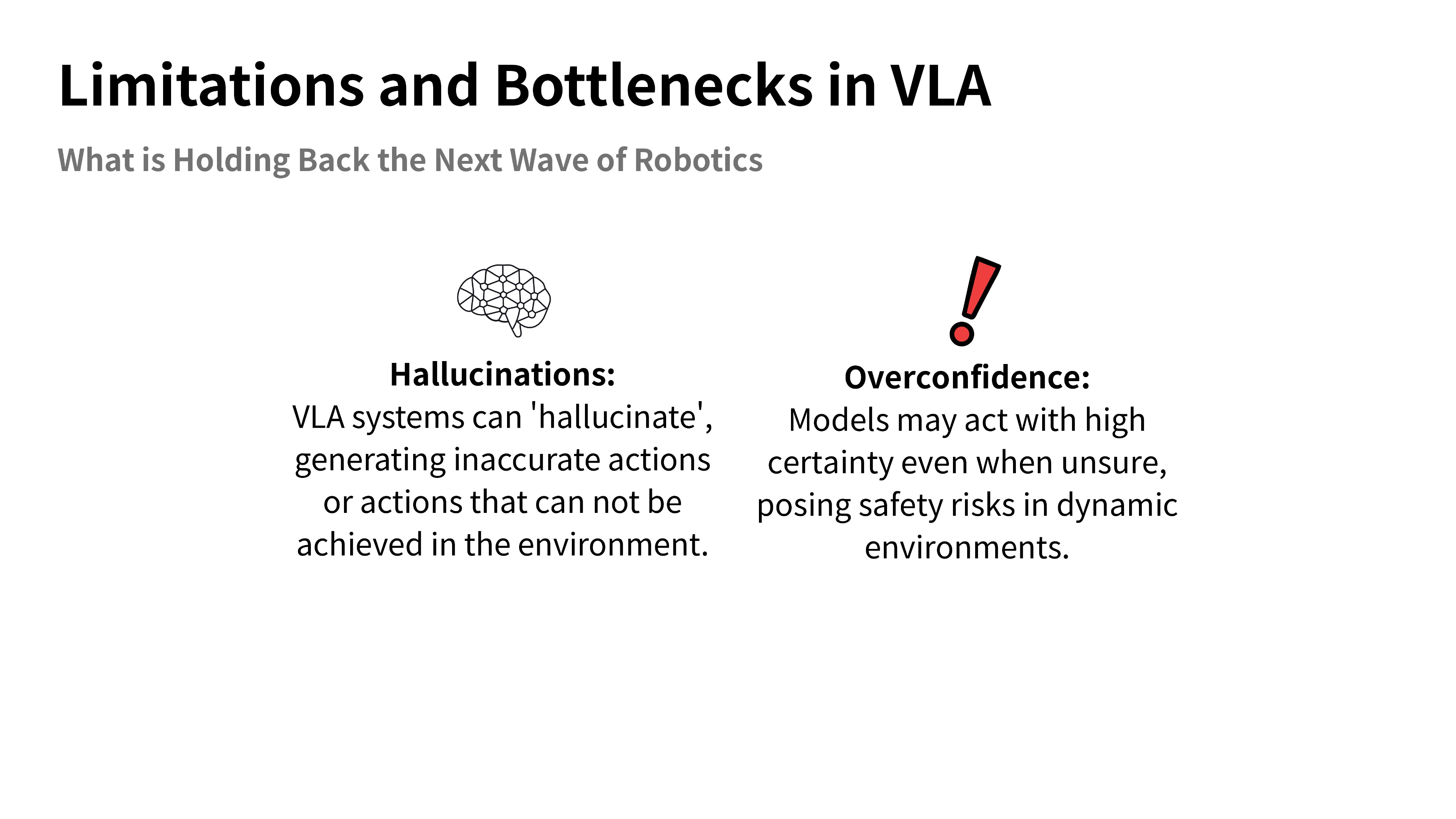
- Discuss what goes wrong when deploying on real robots (sim2real)
🎯 Goal
The project is designed to be beginner-friendly. By the end of the term, members should understand how a VLA-style policy can be deployed on a real robot, like a LeRobot arm.
More details coming soon, feel free to ask if you’re curious or want to get involved 🤩